【萝卜圈软件】萝卜圈虚拟机器人软件提供下载 v1.6.0 最新版
软件介绍
萝卜圈虚拟机器人是一款专业的3D机器人在线仿真软件,它为用户提供了一个基于网络的机器人教育和创新设计平台,用户可以在这里轻松设计各种三维任务场景,还能为虚拟机器人设计各种行为和运动模式。萝卜圈采用可视化的图形编程系统,还支持各种语言的编程平台,使用起来非常方便简单,是大家学习人工智能的绝佳软件。
特色功能
基于网络的应用模式
创造性地提出了基于网络的应用模式,将极大降低了了解、使用机器人及智能控制技术的门槛。
物理引擎强力支撑
物理引擎对机器人仿真意义重大,可以实现逼真的现实物理运动模拟,机器人项目的创新能力及学科知识整合能力将极大增强。
开放的项目设计和管理
使用平台提供的各种积木结构,你尽可以构建充满创意的机器人模型。
创新的驱动和传感世界
因为有了物理引擎的支持,平台提供了各种不同物理力学属性的驱动机构,能让你的机器人应对各种复杂的物理环境和任务。
智慧的可视化编程系统
标准化、拖拉式、模块化的可视化图形编程系统,人性化的智能匹配式联想功能,操作变得更简便,让你更专注于解决问题的方法,其他的由他为你展现。
新手入门
欢迎使用“萝卜圈三维机器人在线仿真平台”(以下简称“萝卜圈仿真”), 它提供了全面的机器人仿真解决方案。
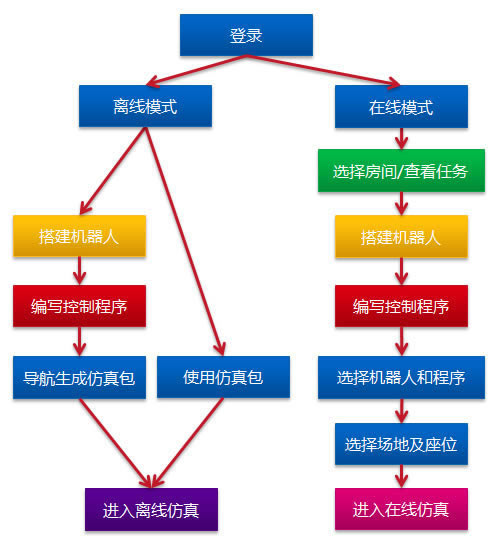
此教程从零开始完成“训练-轨迹”任务,完成此任务需要搭建一部轨迹机器人, 并为之编写图形化控制程序,之后使用仿真导航创建仿真包,最后体验在线仿真过程。
萝卜圈仿真有离线和在线两种模式,离线模式主要进行本地练习使用。 在线模式可完成在线任务,更可与其它用户进行在线PK,并具有积分体系。
图1:操作流程图
注册
在桌面上双击“IRobotQ 3D”快捷方式,启动“萝卜圈三维机器人在线仿真平台”, 在登录窗口中单击“注册”,在浏览器中显示注册网页,填写完整的信息完成注册。
登录
启动完毕后,登录窗口如图 2所示。在登录窗口上输入用户名、密码,选择服务器, 选择登录模式为离线模式,单击“Go!”开始登录,登录完毕后进入离线模式主窗口。
图2:登录

离线模式
离线模式主窗口如图所示,在离线模式下可进行构建场景、构建机器人、编写程序、开始仿真、资源管理、切换到在线模式等。
图3:离线主界面

教程任务
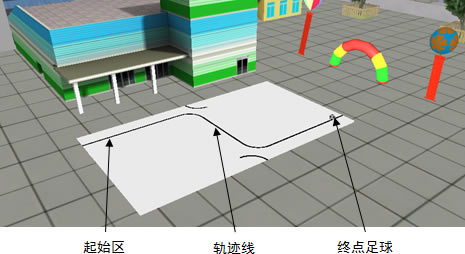
此教程完成“训练-轨迹”任务需要的机器人和控制程序,任务场景如图 4。任务要求: 机器人从起始区出发,沿轨迹线行走到终点,碰到放在终点的足球时完成任务, 机器人在行走过程中脱离轨迹线视为任务失败。
图4:“训练-轨迹”任务场景
提示:“训练-轨迹”任务包含在“官方离线”任务中,仿真导航时可以选择
更新日志
增加了作品的手动全量云同步功能
在资源管理界面,打开/保存文件界面可进行手动云同步操作
同步规则是:将最新修改的文件(以服务器时间为准)上传到云端(或者校园服务端),将本地没有的文件从云端(或者校园服务端)下载
新VPL编程时,同时支持c和python代码的预览
新优化了比赛时机器人/程序保存性能,尽量减少低网速的影响
点击下载编程软件 >>本地高速下载
点击下载编程软件 >>本地高速下载